")
")
Процесс постройки ЧПУ станка по дереву.
Появилось немного свободного время. Опыта в постройке станков нет. Но всё-же, попробую построить небольшой (1200х700х150) и относительно недорогой CNC-станок для обработки дерева. Конкретных задач для него не ставлю. Цель постройки - посмотреть, что смогу сделать. Изготовливать буду в домашних условиях, на том оборудовании и теми инструментами, которые имеются в наличии. Поэтому, не строю больших иллюзий, и на большую точность станка не расчитываю, да и для обработки дерева это не нужно.
Ещё несколько лет назад, когда оЧПУшивал фрезерный станок, читал форумы, литературу, и для себя сделал вывод, что в качестве приводов никаких шаговых моторов, только сервы. (Но это чисто моё мнение!) Поэтому, и на проектируемом станке в качестве приводов будут установлены АС сервомоторы.
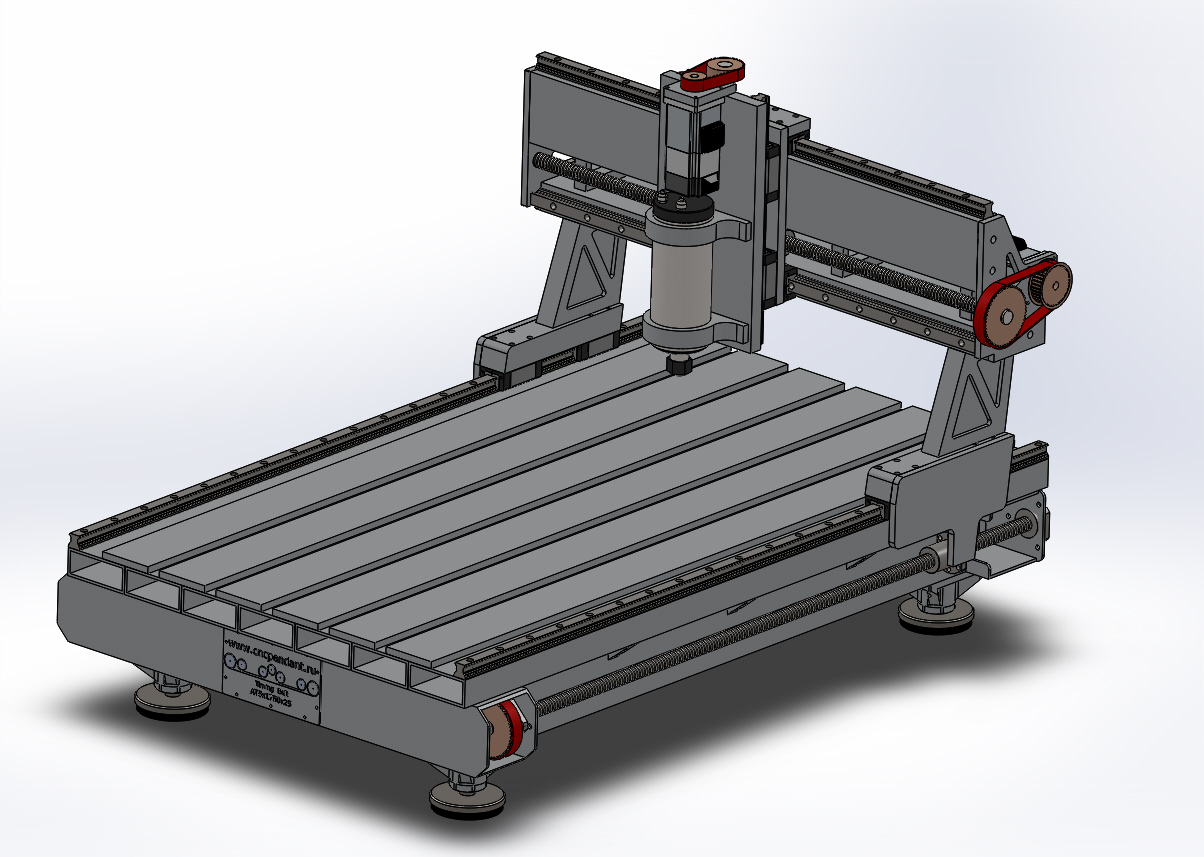
Станок планируется классической портальной схемы из алюминивого бокса АД31Т 100х40х4, 100х100х4, на рельсовых направляющих 20-го типоразмера и ШВП 2005 по всем осям. Т.к. стол оносительно широкий (700мм), чтоб не было перекоса портала при работе, по оси Х будет установлено 2 ШВП, соединённых ременной передачей. Ось Y в виде портала одно из популярных решений. Но нужно учитывать некоторые моменты. Особо углубляться в теорию по конструированию станка нет смысла. Много информации можно найти в сети, например, здесь. Поэтому, не вижу необходимости дублировать. Но на некоторых принципах, которых постараюсь придерживаться при постройке, хотелось бы обратить внимание. В основном, это касается подвижной части станка - портала (осей Y и Z):
-Для снижения износа рельсовых направляющих и ШВП очень важна устойчивость и баланс портала. Чем больше расстояние между каретками оси Х, тем лучше устойчивость, но уменьшается рабочее поле по Х.
-По возможности стараться уменьшать высоту портала. Это снизит вероятность резонанса.
-Минимизировать вылет шпинделя. Центр масс портала расположить посередине между каретками направляющих оси Х.
Для оси Z подобные принципы:
-Максимально возможно разнести рельсовые направляющие оси Y, а так же каретки осей Y и Z.
-На сколько возможно уменьшить пластину-основание под шпиндель.
В SolidWorks создана модель для определения компоновки, расчёта количества профиля.
Полупрозрачный вид станка. Отчетливо видны т.н. "шпангоуты".
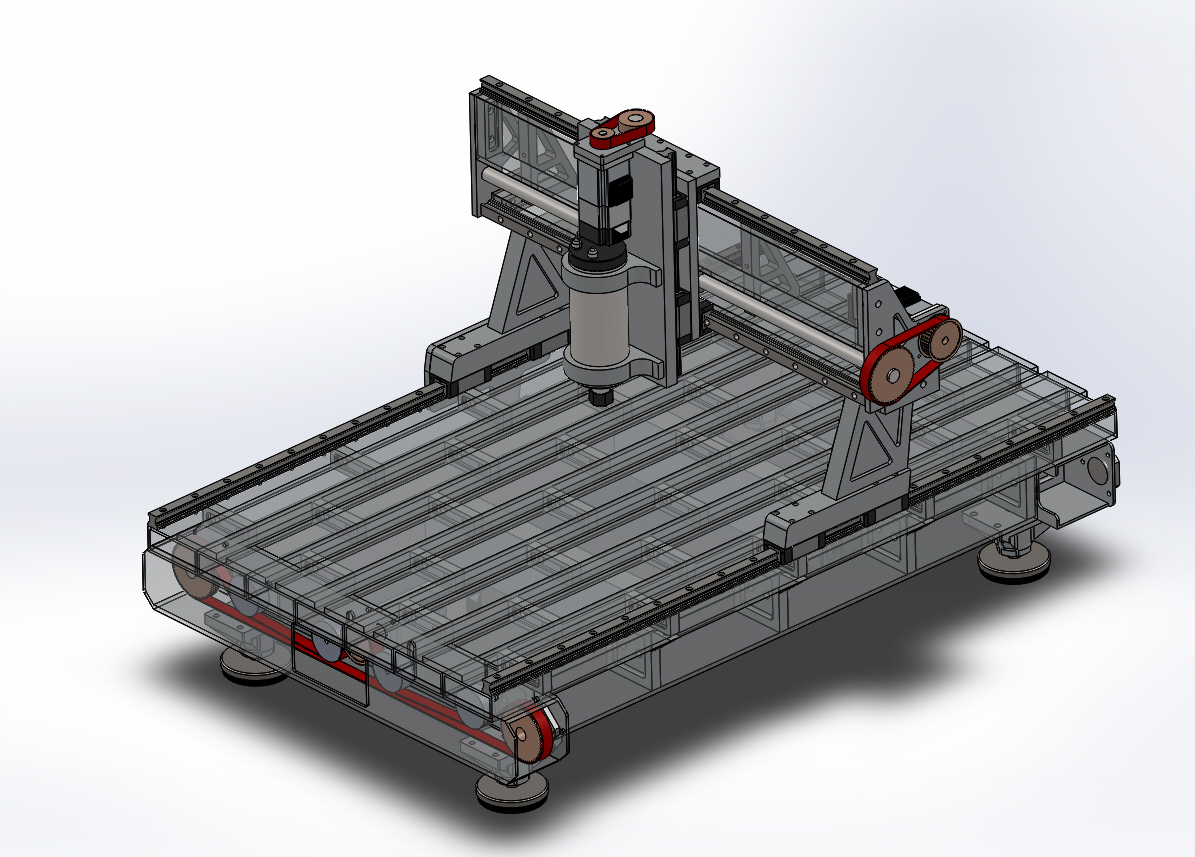
Портал сконструирован таким образом, чтоб его центр масс располагался точно между каретками направляющих оси Х.
Выбор алюминиевого бокса обусловлен тем, что он легче в обработке, более ровный чем аналогичные трубы из стали, что должно упростить процесс сборки. Между собой боксы всей конструкции будут проклеены эпоксидным клеем ВК-9 с фиксацией болтами М5, М10 и резьбовыми заклёпками Scell-it.
4. Электроника.
Комментарии
Юрий! Спасибо! Но я покупаю части у производителей,в этом сложностей никаких нет. Выходит гораздо дешевле!
Добавил Форум на сайт. Двайте продолжим дисскусии там. По-моему, это будет удобней?
упустил что сервы планируются
это вносит корректировки в мои выводы
чем управлять
Linux ?
MACH по Step/Dir ?
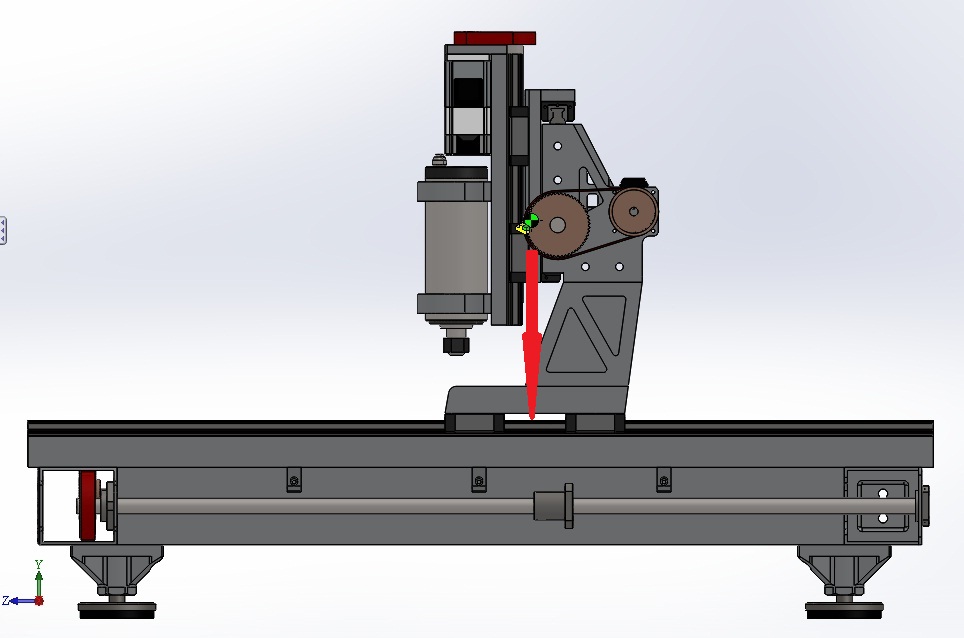
любой ремень даст вам и погрешность и усложнит конструкцию
по скорости то смотря как вы поставите шестерни
на картинке видно что у оси Z ведущий шкив маленький
соответственно надо больше оборотов давать движку
и соответственно он потеряет в мощности
и увеличится пропуск шагов
мой проектик изначально так же был на аналогичной конструкции
переделано на прямой привод ШВП от движка
скорость выше,точность больше
forum.tecnocom-ug.ru/.../
Что Вы подразумеваете под "замедлять ось Z"? Хотелось бы узнать Ваши мысли относительно ременной передачи по Y и Z.
Но вот насчет ременной передачи по Y и Z надо бы подумать
Если по Y это ради развесовки и компановки, то зачем так ослаблять и замедлять ось Z?
RSS лента комментариев этой записи